|
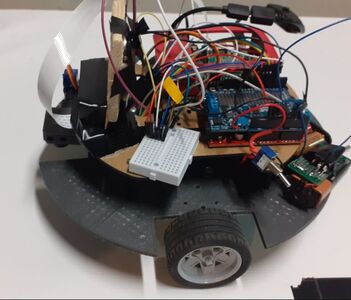
Our robot has an Arduino Uno and a Raspberry Pi 3B.
The Raspberry Pi has a Serial connection with the Arduino. The Pi sends commands to the Arduino, telling it how to move. The Arduino is responsible for the motor control, the line tracing, and obstacle avoidance. The Pi is responsible for detecting the green turn signals, and detecting the victims in the victim room. |
|
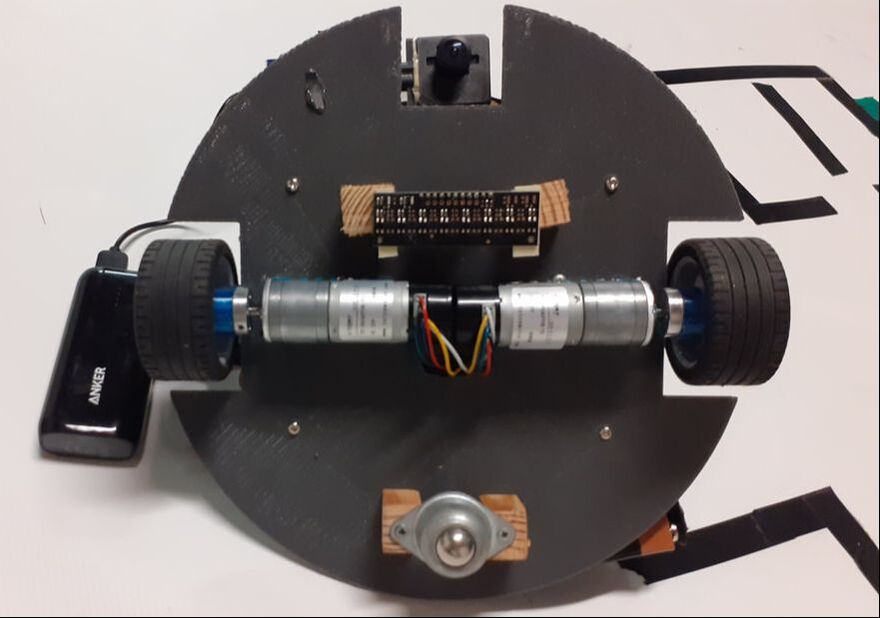
Our robot has two DC motors with Hall Effect sensors that act as encoders so that we can measure the wheels' movement accurately. We have a castor wheel on the back for balance.
We have a camera attached to the Raspberry Pi on the front of the robot. We also have an IR light array near the center of rotation of the robot. |
|
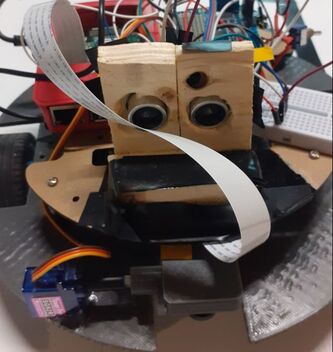
We have an ultrasonic sensor on the front that is used to detect the obstacles that are in the robot's way.
We also have our camera mounted on a servo motor. This means that the camera can be turned to face forwards, instead of down, when the robot enters the evacuation room. |
